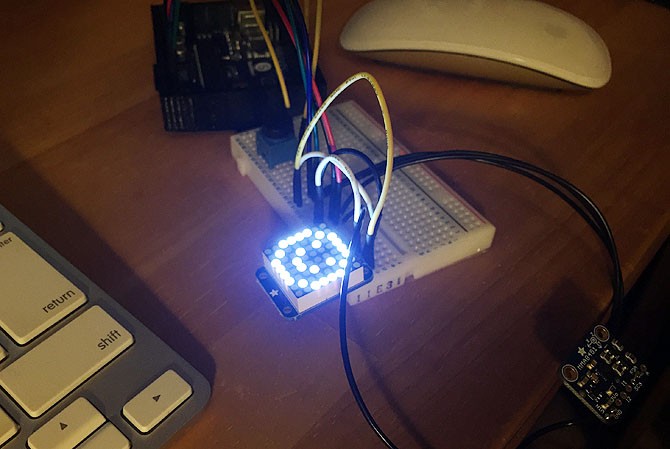
前回加速度センサを実装し、次はディスプレイとなるマトリクスLEDを。使用したのは
Adafruit Mini 8×8 LED Matrix。自作HUDで使用したLEDに比べて一回り小さい。写真のように白色LEDは照度が高くてムスカになってしまいそうだね。照度調整必須。
前回の記事に追記したけど、机の上で加速度センサを傾けると正しく計測されるのは当然として、自転車にのせて水平方向に加速したら水平Gが加算されて正しい角度が計測できなくなるんじゃね?と気付いた。当たり前だろう、のりものは加速するものだから。加速度センサなんだから。
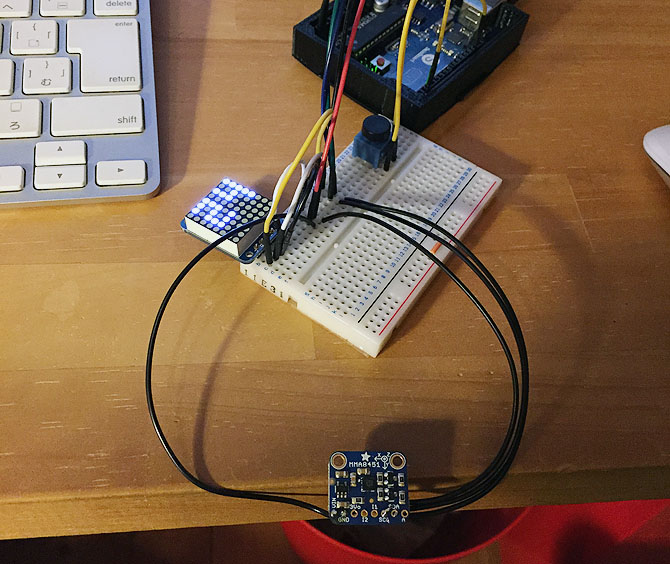
自作HUDと同じく、数値を桁ごとに分解してディスプレイに表示させるコードを書いた。照度は最低でもまだ眩しいくらいなので、3Dプリンタでケースを作った際にハーフミラーやスモークアクリルで更に照度を落としたいところ。
同時に、キャリブレーションスイッチも実装した。スイッチを押した時点でのセンサーの角度を基準とし、その後計測した角度に補正をかけるようにしたので、自転車につけた際には面倒な角度調整が不要となる。
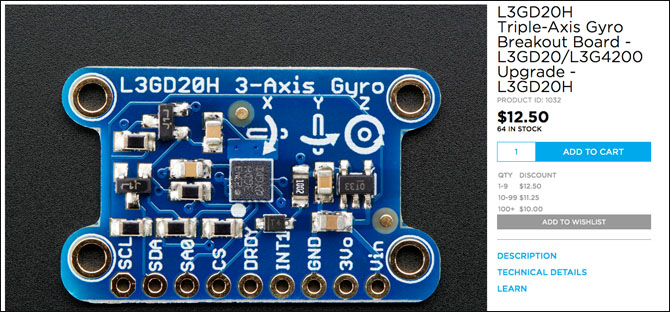
角度を図る部品 = スマホなんかに入ってる = 加速度センサだな。という短絡的思考から部品を選んだ自分に説教をしたいところだけど、これで加速度センサの性質を多少なりとも理解できたので結果良し。ということにしておこう。
しかしね、一定速度で巡航している時はちゃんとした数値が出ているんだ。サンプリング回数を増やして平均値を元に角度計算した効果もあり、振動に影響して数字が乱れる事は無かった。これで諦めるのは惜しい。